Stochastic Activity Network
See the simopt.models.san module for API details.
Model: Stochastic Activity Network (SAN)
Description
Consider a stochastic activity network (SAN) where each arc \(i\) is associated with a task with random duration \(X_i\). Task durations are independent. SANs are also known as PERT networks and are used in planning large-scale projects.
An example SAN with 13 arcs is given in the following figure:
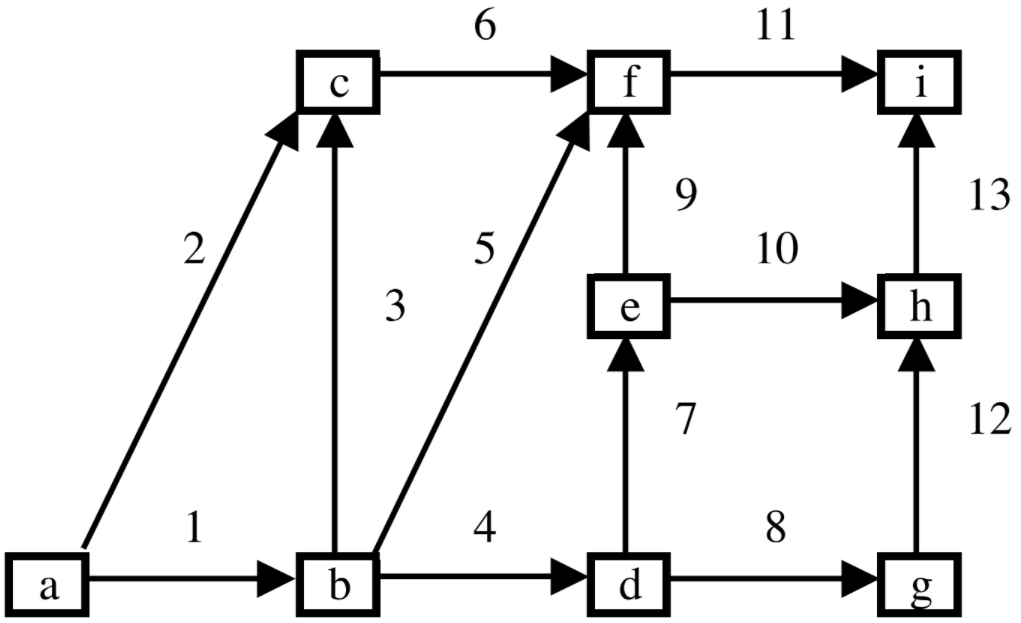
Sources of Randomness
Task durations are exponentially distributed with mean \(\theta_i\).
Model Factors
- num_nodes: Number of nodes.
Default: 9
- arcs: List of arcs.
- Default: [(1, 2), (1, 3), (2, 3), (2, 4), (2, 6), (3, 6), (4, 5),
(4, 7), (5, 6), (5, 8), (6, 9), (7, 8), (8, 9)]
- arc_means: Mean task durations for each arc.
Default: (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1)
Responses
longest_path_length: Length/duration of the longest path.
References
This model is adapted from Avramidis, A.N., Wilson, J.R. (1996). Integrated variance reduction strategies for simulation. Operations Research 44, 327-346. (https://pubsonline.informs.org/doi/abs/10.1287/opre.44.2.327)
Optimization Problem: Minimize Longest Path Plus Penalty (SAN-1)
Decision Variables
arc_means
Objectives
Suppose that we can select \(\theta_i > 0\) for each \(i\), but there is an associated cost. In particular, we want to minimize \(ET(\theta) + f(\theta)\), where \(T(\theta)\) is the (random) duration of the longest path from \(a\) to \(i\) and \(f(\theta) = \sum_{i=1}^{n}\theta_i^{-1}\) where \(n\) is the number of arcs.
The objective function is convex in \(\theta\). An IPA estimator of the gradient is also given in the code.
Constraints
We require that \(theta_i > 0\) for each \(i\).
Problem Factors
- budget: Max # of replications for a solver to take.
Default: 10000
- arc_costs: Cost associated to each arc.
Default: (1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1)
Fixed Model Factors
N/A
Starting Solution
initial_solution: (8,) * 13
Random Solutions
Sample each arc mean uniformly from a lognormal distribution with 2.5- and 97.5-percentiles at 0.1 and 10 respectively.
Optimal Solution
Unknown
Optimal Objective Function Value
Unknown
Optimization Problem: Minimize Longest Path Plus Penalty with Stochastic Constraints (SAN-2)
Decision Variables
arc_means
Objectives
Suppose that we can select \(\theta_i > 0\) for each \(i\), but there is an associated cost. In particular, we want to minimize:
where \(T(\theta)\) is the (random) duration of the longest path from node \(a\) to node \(i\), and
where \(n\) is the number of arcs.
The objective function is convex in \(\theta\).
Constraints
We require that \(\theta_i > 0\) for each \(i\). Additionally, we allow \(n\) stochastic constraints that restrict the expected time to reach node \(i\), of the form:
Problem Factors
- budget: Maximum number of replications the solver is allowed to take.
Default:
10000
- arc_costs: Cost associated with each arc.
Default:
(1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1)
- constraint_nodes: Nodes with corresponding stochastic constraints.
Default:
[6, 8]
- length_to_node_constraint: Maximum expected length to corresponding constraint nodes.
Default:
[5, 5]
Fixed Model Factors
N/A
Starting Solution
initial_solution:
(8,) * 13
Random Solutions
Each arc mean is sampled independently from a lognormal distribution with 2.5th and 97.5th percentiles equal to 0.1 and 10, respectively.
Optimal Solution
Unknown
Optimal Objective Function Value
Unknown